
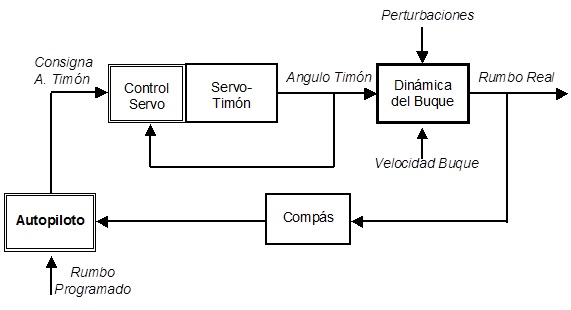
Los autopilotos son utilizados para mantener de forma automática un rumbo predefinido durante un periodo prolongado de navegación. El sistema es capaz de generar las órdenes al timón de gobierno a partir de los datos de sensores de medida como el compás, GPS, anemómetro, etc.

Componentes básicos.
Los pilotos automáticos básicos se componen de los siguientes componentes básicos:
- Una unidad de control.

- Un procesador de gobierno. Es el corazón del sistema de gobierno, conteniendo las interfaces con otros componentes del sistema como el GPS, compás, sonda, anemómetro etc. mediante protocolos NMEA 0183 o alternativos.
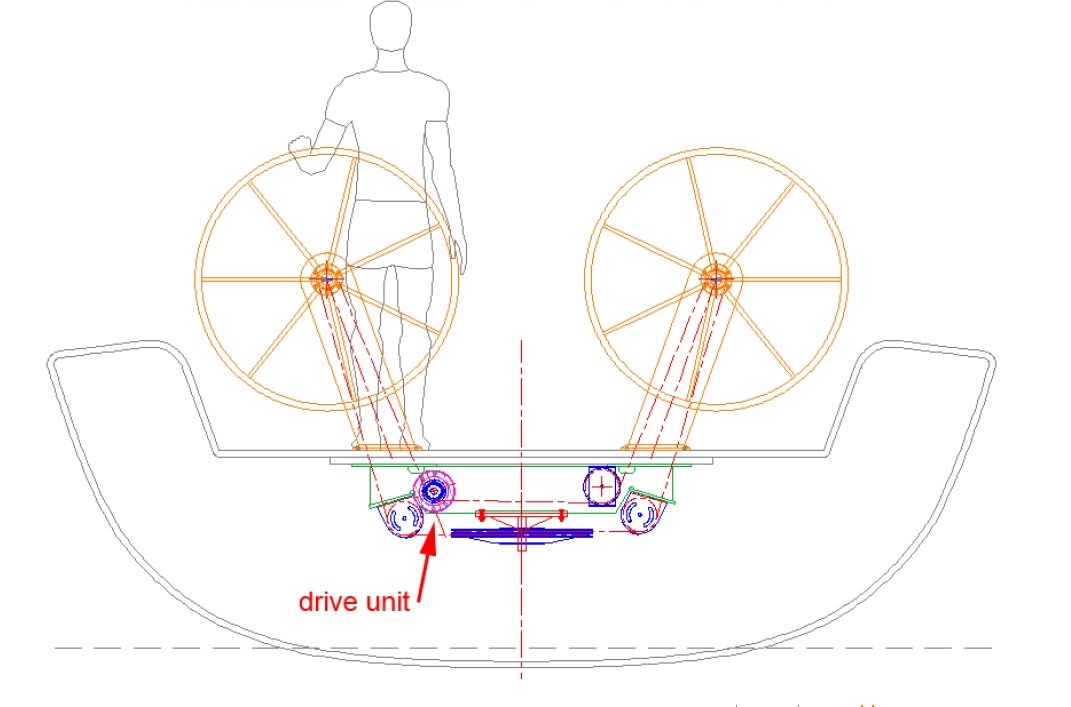
- Una unidad de potencia (ó servo).En embarcaciones menores incorpora una varilla de transmisión y una longitud determinada de metros de cable. Su misión es transformar la variación angular del timón en señales digitales que el procesador de gobierno interpreta.
El sistema puede expandirse con unidades de control fijas ó portátiles como unidades de control remoto.
Tipos de pilotos.
Existen dos tipos principales de pilotos:
1. Pilotos de control proporcional. El gobierno se produce aplicando órdenes de ángulo de caída del timón “proporcional” a la desviación del rumbo real frente al rumbo deseado. La embarcación va sucesivamente oscilando a ambos lados del rumbo deseado.
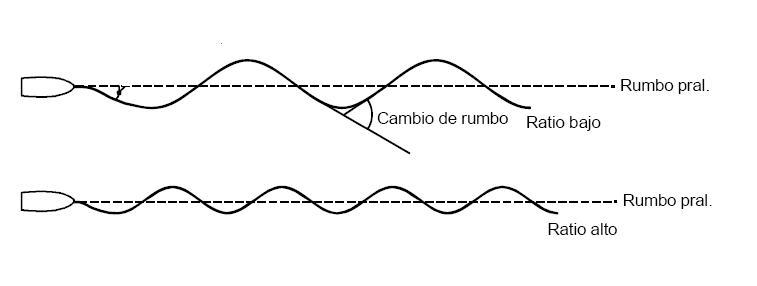
Los sucesivos cambios de rumbo son progamables de tal forma que se pueda “suavizar” el ratio de corrección de rumbo hacia valores más bajos.
2. Pilotos de control derivativo. El ángulo de timón es modificado de forma proporcional a la “variación” del desvío al rumbo. La embarcación navegará en un buen rumbo cuando navega en un rumbo paralelo al deseado, en lugar de ir permanentemente corrigiendo el rumbo.
Funcionalidades de los pilotos automáticos.
En el caso de que la embarcación instale un eco sonda, los pilotos modernos poseen una función de contorno de profundidad, la cual permite ajustar el piloto para que gobierne el barco por encima de un valor definido de profundidad de seguridad, para evitar varadas accidentales. Esta función es muy apreciada por los pescadores.
En el caso de embarcaciones de vela, los pilotos automáticos suelen poseer las siguientes capacidades:
- Auto-Tack. Efectúa una virada de hasta 100° Aprox. cuando se presiona una opción del display. Esto es práctico para navegantes solitarios que efectúan viradas y necesitan al mismo tiempo atender las escotas de las velas.
- Auto Trim. Corrige la posición del timón por errores del rumbo consistente por ejemplo en un incremento repentino de la velocidad del viento. En lugar de retornar el timón a la vía, el piloto automático propondrá una gran corrección a babor o estribor según corresponda.

- Auto Wind. Es la habilidad de un piloto automático para gobernar a un curso del viento aparente, moderado por la estabilidad de curso del compás. Puesto que los sensores del viento aparente tienden a indicar los flujos de viento errático, los pilotos automáticos modernos utilizan un largo período de datos del viento para establecer un promedio y altera el curso del compás despacio para corregir por cambios en la dirección del viento.









Deja un comentario